Электрическое оборудование промышленных предприятий
1. ОБЩИЕ МЕТОДИЧЕСКИЕ УКАЗАНИЯ
1.1. Содержание и объем проекта
Курсовое проектирование – это заключительная работа учащегося по курсу ЭПП и циклу предметов, на которых базируется этот курс (электрический привод, электрические машины, основы автоматики, монтаж электрооборудования, охрана труда).
В состав курсового проекта входит расчетно-пояснительная записка (РПЗ) и графическая часть.
Объем РПЗ и количество чертежей графической части определяются заданием на курсовое проектирование. Задание составляется руководителем проекта, и после утверждения председателем предметной комиссии вручается учащемуся.
Желательно, чтобы задание на курсовой проект соответствовало профилю и месту работы учащегося, чтобы обеспечить более сознательное и качественное выполнение проекта.
Рекомендуемый объем пояснительной записки 25-30 страниц рукописного текста. Записка должна включать все вопросы задания, иметь расчетную часть не менее 25% общего объема.
Графическая часть выполняется в виде чертежей в количестве двух листов формата 24. В пояснительной записке обязательны ссылки на графическую часть, то есть проект должен представлять единое целое.
Для большинства проектов графическая часть- это электрические схемы. По согласованию с руководителем второй лист может быть использован для конструктивного чертежа механизма.
Площадь каждого листа должна быть заполнена не менее чем на 75%, на чертежах обязательна спецификация.
1.2. Указания по оформлению проекта
Пояснительная записка представляет собой текстовый документ с иллюстрациями, который выполняется в соответствии с требованиями ГОСТ 2.105-79*, ГОСТ 2.10-68*.
Расчетно-пояснительная записка переплетается в твердую папку и комплектуется в следующем порядке:
ü титульный лист;
ü содержание (оглавление) РПЗ;
ü текст РПЗ;
ü приложение и иллюстрация, если они помещены не в тексте;
ü список использованной литературы;
ü задание на проектирование.
Оформление листов пояснительной записки ( текстовой части, титульного листа, таблиц, рисунков): текстовая часть записки (сам текст, написание формул, их нумерация, расшифровка, оглавление, список использованной литературы) производится в соответствии с вышеприведенными ГОСТами и подробно приводится учащимся на установочных лекциях по курсовому проектированию.
Графическая часть проекта выполняется карандашом на формате 24 в соответствии с требованиями ГОСТ 2.301-68* - ГОСТ 2.318-81 (общие правила выполнения чертежей).
Правила выполнения изделий машиностроения и приборостроения изложены в ГОСТ 2.401-68* - ГОСТ 2.427-75.
Чертежи общих видов изделий выполняются в соответствии с требованиями ГОСТ 2.118-73* - ГОСТ 2.120-73*.
Правила выполнения схем в стандартах ГОСТ 2.701-76* - ГОСТ 795-80
Указанные выше стандарты приведены в учебниках и справочниках по черчению, а также в отдельных официально издаваемых сборниках ЕСКД.
Оформление чертежей (листа, основной надписи, спецификации) подробно излагается преподавателем в период установочных занятий по курсовому проектированию.
Изображение и наименование элементов электрических схем должно соответствовать требованиям ЕСКД. Ввиду того, что большинство учебных пособий по курсу последнее время не переиздавалось, наименование элементов схем в них не соответствует ЕСКД.
Ниже приводятся наименования наиболее часто встречающихся элементов электрических схем (табл. 1).
Таблица 1
БУКВЕННЫЕ ОБОЗНАЧЕНИЯ ОСНОВНЫХ ЭЛЕМЕНТОВ ЭЛЕКТРИЧЕСКИХ СХЕМ
|
Группа видов элементов |
Первая буква кода |
Вид элемента |
Буквенный код |
|
1 |
2 |
3 |
4 |
|
Устройство |
А |
Регулятор тока Регулятор напряжения Блок реле, комплект защит Устройство АПВ |
АА А АК КК |
|
Преобразователь неэлектрических величин в электрические или наоборот |
В |
Громкоговоритель Телефон Фотоэлемент |
ВА ВF BE |
|
Конденсаторы |
С |
Силовая батарея Зарядные блоки конденсаторов |
CB CG |
|
Интегральные схемы |
Д |
Интегральные аналоговые схемы Интегральные цифровые схемы |
ДА ДД |
|
Разные элементы |
Е |
Нагревательный элемент Осветительная лампа |
ЕК ЕL |
1.3. Защита проекта
Курсовой проект должен быть выслан в техникум строго по графику выполнения контрольных работ.
При нарушении требований к оформлению проект не проверяется или оценивается неудовлетворительно, поэтому учащиеся должны хорошо уяснить и законспектировать все требования по оформлению пояснительной записки и графической части проекта в период установочных занятий.
Учащийся, получив проект после проверки, обязан исправить все отмеченные ошибки и доработать проект согласно замечаниям преподавателя. В этом случае проект допускается к защите.
При защите учащийся должен остановиться на основных решениях, принятых в проекте, ответить на вопросы преподавателя. Он должен хорошо знать работу принципиальных схем, ориентироваться в вопросах, связанных с устройством, принципом действия всех элементов, используемых в проекте, уметь аргументировать принятые в проекте решения.
Окончательная оценка ставится по итогам защиты проекта.
2.ТЕМАТИКА И МЕТОДИЧЕСКИЕ УКАЗАНИЯ К ВЫПОЛНЕНИЮ КУРСОВОГО ПРОЕКТА
2.1. Тематика курсовых проектов
По специальности ЭПП техникум готовит в основном специалистов для обслуживания металлургического производства, и тематика курсовых проектов относится, как правило, к предприятиям металлургического цикла. Выбор темы курсового проекта должен осуществляться учащимся с тем, чтобы эта тема была близка к производству, на котором он работает, и для возможности преемственности курсового и дипломного проектирования.
Ниже приведен перечень некоторых рекомендуемых тем:
Тема 1. Электропривод механизма передвижения моста мостового крана.
Тема 2. Электропривод механизма передвижения тележки мостового крана.
Тема 3. Электропривод механизма подъема мостового крана.
Тема 4. Электрооборудование конвейерной линии.
Тема 5. Электрооборудование механизмов УСТК КХП.
Тема 6. Электрооборудование коксовыталкивателя.
Тема 7. Электрооборудование механизмов обогатительной фабрики.
Тема 8. Электрооборудование агломашины.
Тема 9. Электрооборудование обжиговой машины.
Тема 10. Электрооборудование главного подъема доменной печи.
Тема 11. Электрооборудование лебедок конусов доменной печи.
Тема 12. Электрооборудование зондовых лебедок доменной печи.
Тема 13. Электрооборудование газоочистки.
Тема 14. Электрооборудование механизма наклона миксера.
Тема 15. Электрооборудование механизма качания кристаллизатора УНРС.
Тема 16. Электрооборудование механизма тянущей клети УНРС.
Тема 17. Электрооборудование вспомогательных механизмов УНРС.
Тема 18. Электрооборудование механизма поворота конвертера.
Тема 19. Электрооборудование главного привода прокатного стана.
Тема 20. Электрооборудование рольганга прокатного стана.
Тема 21. Электрооборудование манипулятора прокатного стана.
Тема 22. Электрооборудование нажимного устройства прокатного стана.
Тема 23. Электропривод намоточных устройств.
Тема 24. Электрооборудование одного из механизмов одноковшового экскаватора.
Тема 25. Электрооборудование металлорежущего станка.
Тема 26. Электрооборудование грузового лифта.
2.2. Содержание задания на курсовой проект
Вопросы, подлежащие рассмотрению в курсовом проекте, зависят от характера темы и определяются руководителем курсового проекта. Ниже приведен примерный перечень вопросов для типового задания на курсовой проект.
Пояснительная записка
Введение.
1. Технологический процесс цеха, роль проектируемого механизма в технологическом процессе, требования к приводу.
2. Описание конструкции, кинематика механизма.
3. Выбор рода тока и величин напряжения.
4. Расчет и выбор мощности электродвигателя механизма.
5. Построение механической характеристики выбранного двигателя.
6. Расчет и выбор пусковых и регулировочных сопротивлений.
7. Выбор схемы управления, описание ее работы.
8. Выбор аппаратуры управления и защиты.
9. Расчет и выбор проводов и кабелей.
10. Вопросы монтажа и эксплуатации электрооборудования.
11.
Вопросы техники безопасности при эксплуатации и ремонте электрооборудования.
12. Специальный вопрос проекта.
Графическая часть
Лист 1. Принципиальная схема управления приводом механизма.
Лист 2. Принципиальные схемы, временные диаграммы к спецвопросу.
(Может быть замена конструктивным чертежом механизма).
2.3 МЕТОДИЧЕСКИЕ УКАЗАНИЯ К ВЫПОЛНЕНИЮ ОТДЕЛЬНЫХ ВОПРОСОВ ЗАДАНИЯ
2.3.1. Введение
Во введении должны быть рассмотрены вопросы, отражающие современный уровень и перспективы развития данной отрасли производства в свете решений правительства, современный уровень и перспективы развития электроприводов и привода проектируемого механизма.
2.3.2. Технологический процесс цеха, роль проектируемого механизма в технологическом процессе, требования к приводу
При решении этих вопросов необходимо остановиться на технологии производства, для которого проектируется электрооборудование механизма, описать работу технологической схемы цеха в целом, дать анализ продукции, выпускаемой цехом. Привести технологическую схему. Необходимо определить место установки проектируемого механизма, его роль в технологической линии, загруженность механизма, требования к электроприводу с точки зрения регулирования скорости, продолжительности включения, возможных перегрузок, точности остановки, плавности пуска, требуемых характеристик и т.п.
Например, для привода крана характерным является повторно-кратковременный режим работы, необходимость регулирования скорости, значительные перегрузки, частое реверсирование электрическое торможение, значительные вибрации, толчки, частые пуски, в том числе пуски под нагрузкой. Однако требования к приводу могут быть различны в зависимости от роли крана в технологическом процессе. Если от производительности крана зависит производительность цеха в целом, то к его приводу предъявляются самые жестокие требования. Если же кран выполняет вспомогательные, ремонтные операции, то к его приводу таких жестких требований не предъявляется.
К приводам механизмов, обслуживающих доменный процесс, предъявляется ряд требований, основными из которых являются надежность и бесперебойность работы, возможность полной автоматизации процесса загрузки печи.
К приводам основных механизмов конвертерного цеха (миксер, конвертер, сталевоз, машина непрерывного литья заготовок и т.п.) предъявляется целый ряд специфических требований ввиду работы механизмов с жидким металлом. Это 100-процентное резервирование приводов, плавность разгона и остановки, широкие пределы и точность регулирования скорости, остановка механизмов в заданных позициях с высокой точностью, равномерность распределения нагрузки между двигателями и т.п.
Приводы большинства механизмов, прокатных станов должны иметь широкий диапазон регулирования скорости, минимально возможный момент инерции с таким расчетом, чтобы обеспечить минимальное время переходных процессов, так как механизмы прокатного стана работают постоянно в переходных режимах, и от времени переходных процессов зависит производительность стана. Привод должен обеспечить возможность значительных перегрузок по току и моменту, а для ряда приводов (манипуляторы, нажимные устройства) экскаваторную характеристику. Кроме того, в зависимости от механизма, предъявляется ряд других специфических требований.
Текстовый материал по данному вопросу необходимо дополнять вкладышами со схемами и чертежами, отражающими технологическую цепь цеха, циклограмму работы механизма (то есть продолжительность операции, величины токов, моментов и скорости во времени).
2.3.3. Описание конструкции. Кинематика механизма
При рассмотрении данного вопроса необходимо привести краткое описание конструкции механизма, связав текстовый материал с графической частью проекта. При возможности использования различных кинематических схем для привода механизма необходимо выбрать наиболее рациональную. Кинематическую схему необходимо начертить на вкладыше и описать ее.
2.3.4. Выбор рода тока и величины напряжения
При разработке данного раздела следует учитывать, что правильный выбор рода тока и величины напряжения для привода механизмов обеспечивает наиболее высокую производительность и экономичность работы электрооборудования.
Для правильного решения этого вопроса необходимо хорошо изучить режимы работы механизма (пункт 2.3.2.): частоту включений, регулирование скорости, реверсирование; ориентировочно представлять величину мощности двигателя.
При выборе рода тока необходимо сравнивать по преимуществам и недостаткам двигатели постоянного и переменного тока и для проектируемого механизма прийти к решению, какой из видов привода будет более целесообразен.
При этом следует помнить, что двигатели постоянного тока способны дать все требуемые технологией характеристики, обеспечивают при применении тиристорных преобразователей пределы регулирования скорости 1 : 150 и более, имеют значительные преимущества для приводов с ударной нагрузкой, с экскаваторными характеристиками, при автоматическом регулировании скорости в зависимости от нагрузки.
Однако они имеют коммутационные ограничения по максимальной частоте вращения, при их использовании возникает потребность в специальных преобразовательных установках, они значительно дороже двигателей переменного тока, имеют большие габариты и вес, более сложны в эксплуатации.
Двигатели переменного тока не имеют коммутационных ограничений и некоторые режимы обеспечивают лучше, чем двигатели постоянного тока. Так, асинхронные двигатели могут дать более эффективное динамическое торможение в одну ступень с небольшим начальным ударным моментом и позволяют получить плавный бесступенчатый пуск несложным способом. Двигатели переменного тока обладают существенными экономическими достоинствами. Поэтому выбор двигателей постоянного, а не переменного тока приводит к возрастанию как капитальных затрат, так и эксплуатационных расходов и может быть признан правильным, когда с помощью двигателей постоянного тока невозможно обеспечить необходимые технологические характеристики привода.
Выбор рода тока играет большую роль и для аппаратуры управления. Аппараты постоянного тока более просты и надежны, поэтому при использовании привода на переменном токе часто используют аппаратуру управления на постоянном токе.
При выборе рода тока необходимо сразу решать вопросы выбора системы управления. С учетом требований к регулированию скорости может быть выбрана релейно-контакторная система управления; система Г – Д или ТП – Д для двигателей постоянного тока или система ТПЧ – Д для асинхронных двигателей.
Выбор питающего напряжения зависит от ориентировочной мощности двигателя, а также определяется общими условиями электроснабжения предприятия в целом.
Для питания электроприводов постоянного тока применяют напряжение 220, 440, 750 и 1400 В. Для сетей переменного тока до 1000 В номинальным напряжением являются 220/127, 380/220, 660/380 В. Для сетей переменного тока выше 1000 В номинальными напряжениями являются 3, 6, 10 кВ.
2.3.5. Расчет и выбор электродвигателя механизма
Правильный выбор мощности электродвигателя имеет большое значение, так как при этом обеспечиваются минимальные затраты, минимальные потери электроэнергии при эксплуатации, высокая производительность и надежность работы машины. Занижение мощности двигателя вызывает его перегрев при работе, преждевременный выход из строя, а следовательно, простои и аварии. Завышение мощности ухудшает энергетические показатели двигателя: снижается к.п.д.; у асинхронных двигателей снижается коэффициент мощности, cos?, увеличиваются капитальные затраты и эксплуатационные расходы.
Расчет мощности двигателей зависит от режима его работы, поэтому, согласно пункту 2.3.2., четко должен быть определен режим работы механизма: длительный с постоянной нагрузкой, повторно-кратковременный или кратковременный.
Определение мощности двигателей, работающих в длительном режиме с постоянной нагрузкой, непосредственно по формулам, исходя из технологических показателей механизма.
Например:
Насосы:

где Q – производительность насоса, м3/с;
Н – дифференциальный напор, м;




Дифференциальный напор жидкости складывается из трех составляющих:

где



Центробежные компрессоры:

где
Q – производительность компрессоров, м3/с;


Изотермическая и адиабатическая работы могут быть определены по таблице 2.

|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Pк |
105
Па |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
 |
103
Дж/м3 |
132 |
164 |
190 |
213 |
230 |
245 |
260 |
272 |
Вентиляторы:

где
Q – производительность вентиляторов, м3/с;


Ленточный конвейер:

где
Q – производительность конвейера, м3/с;
L – длина конвейера, м;


Для двигателей, работающих с переменной нагрузкой или в повторно-кратковременном режиме, расчет мощности можно подразделить на 3 этапа:
ü предварительный выбор двигателя на основании нагрузочной диаграммы без учета динамических моментов. при этом определяются статические моменты для всех режимов работы привода, определяются среднеквадратичный статический момент и мощность двигателя. двигатель выбирается по каталогу с запасом (порядка 20%);
ü с учетом данных выбранного двигателя строится нагрузочная диаграмма с учетом пусковых и тормозных режимов работы, определяется эквивалентный момент и осуществляется проверка двигателя из условий нагрева;
ü осуществляется проверка двигателя на перегрузочную способность. Проверка на перегрузочную способность производится в соответствии с выражениями:чль проектируемого механизма в технологическом прочтивы развития данной отрасли
асинхронные двигатели:

двигатели постоянного тока:

где




Для обеспечения надежного пуска необходимо, чтобы минимальный момент двигателя


Если выбранный двигатель при проверке не подходит по мощности, то по каталогу выбирается другой, ближайший по мощности двигатель и вновь проверяется.
При необходимости построения полной механической характеристики с учетом всех режимов работы двигателя нужно использовать точную формулу зависимости момента от скольжения:

где

rc, xc – внутреннее активное и индуктивное сопротивление обмотки статора, Ом;
rc', xc' – приведенное внутреннее активное и индуктивное сопротивление ротора, Ом.

2.3.7. Расчет и выбор пусковых и регулировочных сопротивлений
Для определения числа ступеней пускового реостата при контакторном управлении и полной нагрузке может быть рекомендована следующая таблица:
Таблица 5
|
Мощность, кВт |
Двигатели постоянного тока |
Асинхронные двигатели |
||
|
возбуждение |
||||
|
параллельное |
последовательное |
смешанное |
||
|
0,75 – 2,5 |
1 |
1 |
1 |
1 |
|
3,5 – 10 |
2 |
2 |
2 |
2 |
|
10 – 20 |
3 |
2 |
2 |
2 |
|
22 – 35 |
3 |
2 |
3 |
3 |
|
35 – 55 |
4 |
2 |
3 |
3 |
|
60 – 95 |
4 |
3 |
4 |
4 |
|
100 – 200 |
5 |
3 |
4 |
5 |
Пример 4. Для двигателя параллельного возбуждения (пример 1) рассчитать ступени пускового реостата при условии, что статический момент сопротивления при пуске Мс = 0,7.
По данным примера 1 номинальный ток возбуждения Iв.н. = 2,4 А, номинальный ток якоря Iя = 111,6 А. Номинальное сопротивление якоря Rн = 1,97 Ом,

Поскольку пуск нормальный, задаемся током переключения на 25% больше тока статического.
I2 = 1,25• Iя.с = 1,25•78 = 97,5 А;

Согласно таблице 5 принимаем 3 ступени сопротивления, тогда

оттуда I1= I2 • ? = 0,874•2,2 = 1,92.
Полное сопротивление якоря при пуске определяется по формуле:

 |
Сопротивление остальных ступеней:
Сопротивление секций:

Сопротивление секций в Омах:
r1 =

r2 =

r3 =

rд =

Всего: R1 = 1,022 Ом.
Проверка:

что соответствует точности расчетов.
При расчете сопротивлений для двигателя последовательного возбуждения нужно задаться двумя из трех следующих величин: M1 или I1, M2 или I2, числом ступеней z. Число ступеней обычно определяется применяемым пусковым устройством или по данным таблицы 3.
Пример 5. Для двигателя ДП-41 (согласно примеру 2) рассчитать пусковые сопротивления, пуск форсированный Мст = 0,8.
По данным таблицы 5 выбираем число ступеней пускового реостата для двигателя мощностью 23 кВт, z = 2.
По данным таблицы 3 строим естественную скоростную характеристику двигателя (рис. 1).
Рис.1
Расчет производится графо-аналитическим способом.
Принимаем величину максимального пускового момента М1 = 2,5; числу соответствует ток I1 = 2,09 или I1 = 2,09•124 = 260 А, по характеристике скорость двигателя составит ne1 = 700 об/мин. Зададимся током переключения I2 = 150 А. При этом токе ne2 = 880 об/мин.
Сопротивление на первой пусковой характеристике:

Определяем скорость переключения n1.2, которая соответствует начальной скорости на второй ступени (при токе I1).

Внешнее сопротивление на первой ступени:
r1вн = R1 – rдв = 0,846 – 0,165 = 0,681 Ом.
Определяем внешнее сопротивление второй ступени:

Полное сопротивление на второй ступени:
R2 = r2вн + rдв = 0,272 + 0,165 = 0,437 Ом.
Скорость переключения должна соответствовать скорости двигателя на естественной характеристике:

что практически соответствует ne1 = 700 об/мин.
Если n22 оказалась больше, чем ne1, то I2 нужно уменьшить и произвести расчет вновь, добиваясь того, чтобы n22 сделать равной ne1. Если n22 оказалась меньше ne1, то ток I2 нужно увеличить.
Расчет и выбор сопротивлений для асинхронного двигателя с фазным ротором может осуществляться графическим и аналитическим методами.
Для примера рассмотрим аналитический метод расчета.
Пример 6. Произвести расчет ступеней пускового реостата для асинхронного двигателя с фазным ротором МТН 712-10 согласно примеру 3.
Согласно таблице 5 при мощности двигателя 100кВт выбираем 5 ступеней сопротивлений.
Приняв для форсированного режима пуска величину пикового момента

определяем отношение пикового момента к переключающему:

Величину переключающего момента получим из соотношения:

Определим внутреннее сопротивление ротора:

Полные сопротивления в цепи ротора для каждой ступени ускорения:
R5 = ? • rp = 1,88 • 0,02 = 0,0376 Ом;
R4 = ?2 • rp = 1,882 • 0,02 = 0,0707 Ом;
R3 = ?3 • rp = 1,883 • 0,02 = 0,133 Ом;
R2 = ?4 • rp = 1,884 • 0,02 = 0,25 Ом;
R1 = ?5 •rp = 1,885 • 0,02 = 0,47 Ом.
Сопротивления отдельных секций пускового реостата определяем из выражений:
r5 = R5 – rр = 0,0376 – 0,02 = 0,0176 Ом;
r4 = R4 – R5 = 0,0707 – 0,0376 = 0,0331 Ом;
r3 = R3 – R4 = 0,133 – 0,0707 = 0,0623 Ом;
r2 = R2 – R3 = 0,25 – 0,133 = 0,117 Ом;
r1 = R1 – R2 = 0,47 – 0,25 = 0,22 Ом.
Rобщ = r1 + r2 + r3 + r4 + r5 = 0,45 Ом.
2.3.8. Выбор схемы управления, описание ее работы
Выбор схемы управления осуществляется исходя из требований, предъявляемых к данной схеме. Необходимо четко представлять технологию производства и требования к электроприводу, вытекающие из технологического процесса; возможные режимы работы привода.
Как правило, схема управления выбирается из числа типовых схем, поэтому при выборе схемы необходимо сравнить, как минимум, две типовые схемы, которые можно было бы применять для данного привода, определить преимущества и недостатки каждой из них и выбрать более рациональную.
При выборе схем необходимо проявлять творчество, вносить необходимые изменения в типовые схемы, вызванные особенностями эксплуатации механизма.
При описании работы схемы необходимо раскрыть следующие вопросы: защиты и блокировки в схеме, функции, выполняемые схемой управления, запуск системы и работа ее в двигательном режиме; торможение; виды сигнализации.
Описание работы схемы должно быть сжатым и ясным, слишком подробного описания работы схемы не требуется. Однако для успешной защиты курсового проекта нужно твердо знать все возможные режимы работы схемы, назначение каждого элемента, отдельных узлов.
2.3.9. Выбор аппаратуры управления и защиты
Выбор аппаратуры управления осуществляется исходя из условий места установки и режима работы аппаратов.
По исполнению аппараты делятся на открытые, защищенные, закрытые пыленепроницаемые, маслонаполненные, взрывозащищенные.
Аппараты управления предназначаются для работы в продолжительном, кратковременном, повторно-кратковременном режимах.
Выбор аппаратуры управления и защиты производится согласно принятой схеме управления, то есть каждый аппарат, используемый в схеме, должен быть выбран по каталогу.
а) Выбор контакторов, магнитных пускателей
Выбор контакторов и магнитных пускателей осуществляется исходя из величины тока главных контактов (ток статора или ротора двигателя переменного тока, ток якоря или обмотки возбуждения двигателя постоянного тока); по роду тока и напряжению катушки, по числу главных и вспомогательных контактов; по числу допускаемых включений в час.
б) Выбор реле
Все реле можно подразделить на две большие группы: реле защиты и реле автоматики.
К реле защиты относятся максимальные и тепловые токовые реле, реле минимального тока (контроль тока возбуждения, контроль тока в тормозных электромагнитах и т.п.), реле минимального напряжения, реле повышения напряжения и реле э.д.с.
Уставка тока срабатывания максимальных реле принимается на 20 ÷ 30% больше пускового тока.
Iср ? (1,2 ÷ 1,3)·Iпуск.
Для асинхронных двигателей с фазным ротором или для двигателей постоянного тока уставка максимального реле может быть определена по формуле:
Iср ? (2 ÷ 2,5)·Iном.
Тепловые реле и нагревательные элементы выбираются исходя из номинального тока двигателя:
Iт.р = (1 ÷ 1,1)·Iном.
Уставка отпадания минимального токового реле определяется минимально допустимым током возбуждения:
Iотп = Iвозб min.
Уставка втягивания минимального реле напряжения должна соответствовать 65% номинального напряжения сети:
Uвт = 0,65·Uн.
В качестве реле высокого напряжения и реле э.д.с. обычно выбираются типовые реле (с напряжением катушки, равным напряжению сети), а их настройка осуществляется с помощью последовательно включенных резисторов.
При выборе реле автоматики необходимо учитывать напряжение катушки, число контактов, необходимых в схеме, для реле времени – величину выдержек времени.
Выбор аппаратуры управления следует свести в таблицу.
Таблица 6
ВЫБОР АППАРАТУРЫ УПРАВЛЕНИЯ
|
Обозначение на схеме |
Наименование |
Требуемые технические данные (по схеме управления) |
Каталожные данные |
|
|
Тип |
Технические данные |
|||
|
КМ1 |
Контактор |
Ток гл. контактов - 90 А Напряжение катушки -220 В Кол-во гл. контактов - 1 з Кол-во вспомогательных контактов – 2 з |
КПВ-602 |
Ток гл. контактов – 100 А Напряжение катушки – 220 В Число гл. контактов – 1 з Кол-во вспомогательных контактов – 4 з Число включений в час - 1200 |
|
КТ |
Реле времени |
Напряжение катушки -220В Выдержка времени 2 с Число контактов – 1 з*, 1 р* |
РЭВ-812 |
Напряжение катушки – 220 В Выдержка времени 0,8÷2,5 с Число контактов – 1 з, 1 р |
|
КА |
Реле макс. тока |
Iср = 2,5Iн = 2,5•90 = 225 А Кол-во контактов – 1 р |
РЭВ-570 |
Ток втягивания – 250 А Кол-во контактов – 1 з, 1 р |
р* - размыкающий контакт.
Выбор аппаратуры защиты – плавких вставок, автоматических выключателей – осуществляется исходя из величины номинального напряжения и тока вставки, теплового или электромагнитного расцепителя.
Выбор контроллеров, путевых и конечных выключателей осуществляется исходя из величины коммутируемого тока, необходимого количества цепей коммутации.
Мощность и величина сопротивлений резисторов определяется расчетом в зависимости от места их использования.
2.3.10. Расчет и выбор проводов и кабелей
Расчет проводов и кабелей для питания низковольтных электродвигателей осуществляется по нагреву из условия:
Iрасч ? Iдоп.
При значительной длине кабеля осуществляется проверка по потере напряжения.
При рассмотрении тем 1, 2, 3 необходимо выбрать не только провода, питающие двигатель, но и главные контактные провода – троллеи, проложенные вдоль подкрановых путей.
Для крановой сети характерен повторно-кратковременный режим работы. В связи с этим выбор троллеев, проводов и кабелей на нагрев осуществляется по эквивалентной силе тока.
Приближенно для групп асинхронных двигателей крановых механизмов расчетный ток определяется по следующей формуле:

Для группы электродвигателей постоянного тока:

где Рр – расчетная мощность группы электродвигателей, кВт;
Uн – номинальное напряжение сети, В;
? – усредненный ? группы двигателей (при расчетах принимаем 0,8 ÷ 0,85);
cos? – усредненный коэффициент мощности группы двигателей (при расчетах принимается 0,6÷0,7).
Расчетная мощность зависит от режима работы крановых механизмов и может быть определена по формуле:

где

кВт;


Численные значения коэффициентов Ки и с приведены в таблице 7.
Таблица 7
|
Место установки крана |
Ки |
с |
|
Котельные, ремонтные, сборочные и им подобные цехи Литейные цехи Мартеновские, конвертерные цехи и миксерные отделения (заливочные, разливочные и завалочные краны) Шихтовые дворы, дворы изложниц и шихтовые отделения мартеновских цехов Прокатные цехи |
0,12 0,18 0,2 0,44 0,36 |
0,4 0,6 0,3 0,5 0,6 |
Сечения троллеев или питающих кабелей выбираются из условия:

На допустимую потерю напряжения крановую сеть, питающую группу электродвигателей, проверяют по максимальной силе тока Imax , которая определяется при пуске наибольшего двигателя, если остальные двигатели работают в нормальном режиме:

где


?пус __ кратность пускового тока этого двигателя.
Допускаемая потеря напряжения в крановой сети при протекании максимального тока принимается 8 __ 12% и примерно распределяется следующим образом:
главные контактные провода 3 __ 4%;
магистраль до контактных проводов 4 __ 5% ;
сеть в пределах крана 1 __ 3%.
В качестве крановых троллеев обычно используются стальные уголки, швеллеры или рельсы. Величина потери напряжения в этом случае определяется:

ü для группы асинхронных двигателей;

ü для двигателей постоянного тока,
где


Если

2.3.11. Вопросы монтажа, наладки
и эксплуатации электрооборудования
В этом вопросе необходимо остановиться на компоновке оборудования, выбрать наиболее рациональные решения по размещению оборудования на панелях управления, по расположению панелей, подобрать наиболее рациональную схему питания.
Текстовый материал дополняется чертежами. В отдельных случаях, по согласованию с руководителем, второй лист графической части может быть заменен монтажной схемой. Кроме того, следует остановиться на необходимых испытаниях, предусмотренных «Правилами устройств электроустановок» при включении электрооборудования в работу; на вопросах настройки отдельных элементов схемы, произвести расчет настроечных резисторов; определить порядок подачи напряжения и включения электрооборудования в работу.
В этом же разделе необходимо остановиться на наиболее часто встречающихся неисправностях в схеме управления, способах их устранения, на организации ремонтов электрооборудования и текущей его эксплуатации.
2.3.12. Вопросы техники безопасности при эксплуатации
и ремонте электрооборудования
При выборе схем управления следует обратить особое внимание на обеспечение безопасной работы привода. Схема управления должна иметь необходимые защиты и блокировки для обеспечения надежной и безопасной эксплуатации электрооборудования.
В схеме также должны быть предусмотрены необходимые виды световой и звуковой сигнализации об аварийных режимах работы.
Мероприятия, обеспечивающие безопасность работ при эксплуатации и ремонтах электрооборудования, должны конкретно относиться к проектируемому оборудованию, быть четко сформулированы.
\
2.3.13. Спецвопрос проекта
Спецвопрос курсового проекта выдается каждому учащемуся индивидуально. При достаточно сложных темах проекта, когда привод механизма осуществляется по системе ТП __ Д, спецвопрос может отсутствовать.
В тех случаях, когда привод механизма может быть осуществлен асинхронными двигателями или двигателями постоянного тока с релейно-контакторным управлением, в качестве специального вопроса должны включаться вопросы, связанные с работой тиристорных преобразователей, СИФУ, систем автоматического регулирования.
По возможности спецвопросы должны соответствовать оборудованию цеха, в котором работает учащийся-заочник.
Возможные спецвопросы:
а) работа различных схем регулируемых выпрямителей на активную, индуктивную, активно-индуктивную нагрузки;
б) реверсивный ТП, способы управления группами;
в) система раздельного управления ТП, назначение элементов системы, их схемное решение;
г) система импульсно-фазового управления, назначение элементов, схемные решения;
д) работа ТП в режиме выпрямителя и инвертора, ограничение углов регулирования;
е) принципы построения системы УБСР, регуляторы, измерители, датчики;
ж) практическое определение параметров якорной цепи двигателя;
з) контуры ток, скорости, э.д.с., определение передаточных функций регуляторов, опытная настройка контуров;
и) преобразователи частоты для привода;
к) преобразователи частоты в нагревательных установках.
При выполнении спецвопроса учащиеся должны подробно разобраться
с физическими основами, схемными решениями отдельных узлов и элементов, привести необходимые схемы, графики, диаграммы. Ответить на контрольные вопросы при защите курсового проекта.
Л И Т Е Р А Т У Р А
1. Агроник С.Т. Электрическое оборудование доменных цехов. М.: Металлургия, 1966.
2. Асинхронные двигатели серии 4А. Справочник. М.: Энергоатомиз-дат, 1981.
3. Афанасьев В.Д. Автоматизированный электропривод в прокатном производстве. М.: Металлургия, 1977.
4. Вешеневский С.Н. Характеристики двигателей в электроприводе. М.: Энергия, 1977.
5. Долин П.А. Справочник по технике безопасности. М.: Энергоиздат, 1982.
6. Жукова Г.А., Жуков В.П. Курсовое и дипломное проектирование по низковольтным электрическим аппаратам. М.: Высшая школа, 1987.
7. Зимин Е.Н., Преображенский В.И., Чувашов И.И. Электрообо-рудование промышленных предприятий и установок. М.: Энергоиздат, 1981.
8. Зюзин А.Ф., Поконов Н.В., Антонов И.В. Монтаж, эксплуатация и ремонт электрооборудования промышленных предприятий и установок. М.: Высшая школа, 1986.
9. Иванченко Ф.К., Павленко Б.А. Механическое оборудование ста-леплавильных цехов. М.: Металлургия, 1966.
10. Камнев В.Н. Чтение схем и чертежей электроустановок. М.: Выс-шая школа, 1986.
11. Камышёв А.Г. Мостовые электрические краны. М.: Металлургиз-дат, 1962.
12. Карпов Ф.Ф., Козлов В.Н. Справочник по расчету проводов и ка-белей. М.: Энергия, 1969.
13. Князевский Б.А., Чекалин Н.А. Техника безопасности и противопо-жарная техника в электроустановках М.: Энергия, 1973.
14. Крановое электрооборудование. Справочник. /Под общей редак-цией Рабиновича А.А. М.: Энергия, 1979.
15. Липкин Б.Ю. Электрооборудование промышленных предприятий. М.: Высшая школа, 1972.
16. Липкин Б.Ю. Электроснабжение промышленных предприятий и ус-тановок. М.: Высшая школа, 1990.
17. Машины и агрегаты металлургических заводов. М.: Металлургия, 1988.
18. Парницкий А.Б., Шабашов А.П. Мостовые краны общего наз-начения. М.: Машгиз, 1961.
19. Положение о планово-предупредительном ремонте электрообору-дования.
20. Правила устройства электроустановок. М.: Энергоатомиздат, 1986. Гл. 1.3.
21. Правила устройства электроустановок. М.: Энергоатомиздат, 1986. Гл. 1.8.
22. ПТЭ и ПТБ. М.: Энергоатомиздат, 1986.
23. Рапутов Б.М. Электрооборудование металлургических кранов. М.: Металлургия, 1967.
24. Рапутов Б.М. Электрооборудование металлургических кранов. М.: Металлургия, 1977.
25. Рожкова Л.Д., Козулин В.С. Электрооборудование станций и под-станций. М.: Энергоатомиздат, 1987.
26. Савинов А.И. и др. Курсовое и дипломное проектирование по орга-низации и планированию предприятий. М.: Металлургия, 1993.
27. Справочные данные по электрооборудованию. Т. 1, 2. М.: Энергия, 1965.
28. Справочник по наладке электрооборудования промышленных пред-приятий. /Под редакцией Зименкова М.Б., Розенберга Г.В., Феськова Е.М. М.: Энергоатомиздат, 1983.
29. Справочник электротехника в 2-х томах. Под редакцией Смирнова А.Д. Т. 2., вып. 3. Реле защиты и автоматики. М.: Энергия, 1965.
30. Ушаков Н.С. Мостовые электрические краны. Л.: Машинострое-ние, 1980.
31. Федорченко В.А., Шошин А.И. Справочник по машиностроитель-ному черчению. М.: Машиностроение, 1983.
32. Хализев Г.П. Электрический привод. М.: Высшая школа, 1972.
33. Хализев Г.П., Серов В.И. Расчет пусковых, тормозных и регулиро-вочных устройств для электродвигателей. М.: Высшая школа, 1966.
34. Электротехнический справочник в 3-х томах. Т. 2. М.: Энергоиз-дат, 1981.
35. Энергетика СССР в 1986__1990 годах. М.: Энергоиздат, 1987.
36. Яуре А.Г., Певзнер Е.М. Крановый электропривод. М.: Энерго-атомиздат, 1988.
ПРИЛОЖЕНИЕ
1. Расчет лифта
В различных отраслях народного хозяйства используются подъемные механизмы прерывистого режима работы, служащие для перемещения людей и грузов в вертикальном направлении по строго определенному пути в специальных грузонесущих устройствах - кабинах, ковшах, сосудах и т.п. К числу самых распространенных механизмов вертикального транспорта относятся лифты, которые находят все большее применение в зданиях современных промышленных предприятий и в жилых домах.
Лифты являются стационарными механизмами, предназначенными для транспортировки с одного этажа здания на другой грузов и людей в кабинах, которые перемещаются в огражденной со всех сторон шахте. В настоящее время лифты выполняются с высокой степенью автоматизации операций по открыванию и закрыванию дверей, по передвижению и остановке кабины; они отличаются безусловной безопасностью, комфортабельностью и общедоступностью пользования.
По назначению лифты разделяют на пассажирские, грузовые с проводником и без проводника, грузопассажирские, специальные. По скорости движения кабины различают тихоходные (до 0,5 м/с), быстроходные (до 1,0 м/с) и скоростные (свыше 1,0 м/с) пассажирские лифты. Грузовые лифты чаще всего работают при скорости движения кабины 0,1—0,5 м/с. Грузоподъемность пассажирских лифтов составляет от 250 до 1500 кг (т. е. от 3 до 21 пассажира), грузовых — от 50 до 5000 кг.
При большом разнообразии вариантов конструкций пассажирских и грузовых лифтов основными узлами оборудования для них являются подъемная лебедка, канаты, кабина, противовес, двигатель, механический тормоз и аппаратура управления.
1.1. Назначение механизма, характеристика условий окружающей среды
Лифт предназначен для транспортировки с одного этажа здания на другой грузов и людей в кабине, который перемещается в огражденной со всех сторон шахте.
Условия окружающей среды нормальные.
Влажность и температура находятся в норме.
1.2. Техническая характеристика механизма
Лифт изготовлен предприятием ЛИФТИНГ в 1992 году, тип лифта грузовой с проводником, с редукторным приводом. Грузоподъемность лифта составляет 400 кг, число пассажиров – 1, номинальная скорость передвижения – 0,63 м/c, высота подзема – 7,65 м, число остановок – 3.
1.3. Кинематическая схема механизма
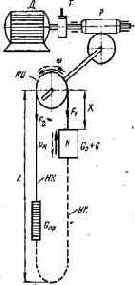 |
1.4. Циклограмма работы
Поскольку, нагрузки лифта и циклы его работы, как правило, могут быть весьма различными, то предварительный выбор мощности двигателя удобнее выполнить исходя из условного расчетного цикла. Этот цикл состоит из рабочих операций подъема номинального груза с первого этажа на последний и спуска пустой кабины на первый этаж.
1.5. Требования, предъявляемые к электроприводу и качеству электрической энергии
Для качественного выполнения операций по транспортировке грузов и пассажиров при высокой производительности электропривод лифтов должен обеспечить: реверсивную работу двигателя; плавный пуск и торможение при условии, чтобы ускорения и замедления, а также их производные не превышали установленные нормы; минимальное время переходных процессов; точную остановку кабины против уровня пола этажа.
Лифты с большой скоростью движения кабины (свыше 2 м/с), с условием, что она должна делать остановки на каждом этаже, фактически не используются по скорости. Потамучто на одном перегоне между этажами (при Н=3,2 — 3,6 м) по условиям заданного ускорения кабина не может развить скорость выше 1,6 — 1,8. м/с. Так как по достижении такой скорости ее опять требуется снижать для обеспечения точной остановки. Скорость кабины более 1,5 м/с принимается для скоростных лифтов в том случае, если они работают с экспрессными зонами, т.
е. обслуживают не все этажи подряд, а кратные 2 или 5. Междуэкспрессные зоны могут обслуживаться лифтами с меньшими скоростями движения.
Допустимые значения ускорения кабины при пуске и замедления ее при остановке в нормальных режимах работы для тихоходных и быстроходных лифтов составляют 1,5 м/с2, для скоростных лифтов 2,5 м/с2. Максимальное замедление при остановке кнопкой «Стоп» не должно превышать 3,0 м/с2. Наибольшая допустимая скорость изменения ускорения (производная ускорения по времени — рывок) ограничивается значениями 3 — 10 м/с3. Ограничение ускорения и рывка определяется нормальным самочувствием пассажиров независимо от их возраста и состояния здоровья, а также необходимо в целях снижения динамических нагрузок на несущие канаты и кабину лифта.
Для обеспечения удобства и безопасного входа и выхода пассажиров, загрузки и выгрузки грузов, а также для сокращения длительности этих процессов кабина лифта после торможения должна остановиться против уровня этажной площадки с заданной степенью точности. Неточная остановка в пассажирских лифтах влечет за собой увеличение времени входа и выхода пассажиров, в грузовых лифтах — затрудняет, а в некоторых случаях делает невозможной загрузку и разгрузку кабины.
При автоматизации подъемной установки какие-либо действия оператора исключаются, и управление процессом точной остановки полностью возлагается на электропривод, что в ряде случаев оказывает решающее значение на выбор типа электропривода лифта. Для обеспечения точной остановки кабины обычно применяют снижение ее скорости перед остановкой.
1.6. Выбор систем электропривода, рода тока и напряжения, способ регулирования скорости и торможения
Для привода лифтов применяют двигатели с жесткими механическими характеристиками — трехфазные асинхронные и постоянного тока с независимым возбуждением, специально рассчитанные на повторно-кратковременный режим работы (серий АС, АСШ, МПЛ, а также крановых серий), либо двигатели продолжительного режима работы (серий АО2, 4А, П, 2П).
Для упрощения конструкции лифтовых установок и возможности эксплуатации их персоналом средней квалификации целесообразно применять наиболее простой электропривод с асинхронным двигателем с короткозамкнутым ротором. Однако такие двигатели могут быть использованы только в тихоходных пассажирских и грузовых лифтах.
Так как мы рассматриваем грузовой, тихоходный лифт, то целесообразно применить электропривод с асинхронным двигателем с короткозамкнутым ротором.
Торможение лифта будет осуществляться с помощью электромагнитного тормоза, который позволяет быстро остановить электродвигатель.
1.7. Расчет статических нагрузок и мощности электродвигателя
Определяем силу тяжести противовеса:


где Gпр. – сила тяжести противовеса, Н;
G0 – сила тяжести пустой кабины, Н; a = 0,5 _ коэффициент уравновешивания;
Gном – сила тяжести номинально поднимаемого груза, Н.


Определяем усилие на канатоведущем шкиве:





Определяем статическую мощность на валу двигателя:
- при работе двигателя в двигательном режиме:


где Pc – статическая мощность, кВт;
vк – скорость движения кабины, м/c;
n – КПД редуктора при прямой и обратной передаче мощности, %.


- при работе двигателя в генераторном режиме:




Определяем статический момент на валу двигателя:
- при работе двигателя в двигательном режиме:


где Dк.ш – диаметр канатов едущего шкива, м;
ip – передаточное число редуктора;


- при работе двигателя в генераторном режиме:




Определяем эквивалентную статическую мощность:




Определяем эквивалентный статический момент :
Мс.э.=


Мс.э.=


Определяем продолжительность включения в цикле ПВ:
ПВ =


ПВ =


Определяем расчетную мощность при стандартной ПВ:




Определяем требуемую мощность двигателя:


где kз =1,5 – коэффициент запаса, учитывающий влияние на нагрев двигателя динамических нагрузок;


Определяем необходимую угловую скорость двигателя, рад/с:


где



1.8. Выбор типа электродвигателя и проверка его по нагреву и перегрузочной способности
По каталогу выбираем электродвигатель повторно-кратковременного режима работы из условия:



Выбираем двигатель типа 4AH180SHЛБ.









Определяем номинальный момент двигателя:




Определяем момент нагрузки при стандартной ПВн:




Сопоставим приведенные к одной стандартной ПВн =40%


Так как


Определяем максимальный статический момент:




Сопоставим


Так как


1.9. Выбор источника питания
Привод лифта будет питаться от силового щита, который в свою очередь будет запитываться от силового трансформатора мощностью 400 кВА.
Определяем номинальный ток двигателя :




Таким образом, по расчету выбираем для питания асинхронного двигателя трехфазную четырехпроводную электрическую сеть напряжением 380/220 В, по которой в дальнейшем выбирается пусковая аппаратура и проводящие кабели.
Цепь управления, расположенная в кабине лифта питается через понижающий трансформатор напряжением 220/24 В.
1.10. Выбор элементов схемы управления электроприводом
1.10.1 Выбор магнитного пускателя
Выбираем магнитный пускатель из условия:


К установке принимаем магнитный пускатель типа ПМЛ- 2600:


1.10.2 Выбор конечных выключателей
Конечные выключатели применяются главным образом для предотвращения выхода исполнительных органов из рабочей зоны.
К установке принимаем конечный выключатель типа: ВБ-30 с номинальными данными: Iн =15 А; Uн =220 В.
1.10.3. Выбор кнопок управления
Эти аппараты предназначены для подачи оператором управляющего воздействия на электропривод.
К установке принимаем кнопки управления типа: КУ- 120 с номинальными данными: Iн = 15 А; Uн = 24 В, в количестве четырех штук.
1.10.4 Выбор указательных реле
Для включения сигнализации в кабине будут использоваться указательные реле типа: РУ-21 с номинальными данными: Iн =15 А; Uн =24 В.
1.10.5 Выбор электромагнитного тормоза
Для остановки кабины лифта, будет использоваться электромагнитный тормоз типа ТКТ с короткоходовыми однофазными электромагнитами типа МО-200. Они обеспечивают тормозные моменты от 11 до 240 Н·м и имеют износостойкость до 1,5·

1.10.6 Выбор понижающего трансформатора
Для безопасности обслуживания цепи сигнализации лифта подключаются к сети через понижающий трансформатор.
К установке принимаем понижающий трансформатор типа: ОСО- 0,25
1.10.7 Выбор рычажного переключателя
Командным аппаратом в схеме управления лифтом будет рычажный переключатель.
К установке принимаем рычажный переключатель типа РП с номинальными данными: Iн =15 А; Uн = 220 В.
1.11. Выбор аппаратов защиты
1.11.1 Выбор автоматического выключателя
Определяем пусковой ток:




Выбираем автоматический выключатель по условию:








К установке принимаем автоматический выключатель типа А3710Б с номинальными данными:


1.11.2 Выбор предохранителя
Предохранители выбираем из условия:






К установке принимаем предохранитель типа НПН-15 с номинальными данными:


1.11.3 Выбор тепловой защиты
Условия выбора теплового реле:


К установке принимаем двухполюсное реле типа ТРН на номинальный ток


1.12. Выбор проводов, кабелей и проверка по потере напряжения
Для силовой цепи выбираем кабель марки ВВГ.
Определяем поправочные коэффициенты:


Определяем длительно-допустимый ток:


где




Определяем сечение кабеля:


К установке принимаем кабель марки ВВГ (4 x 6).
Проверяем кабель по потере напряжения:


где






следовательно, выбранный кабель проходит по потере напряжения.
Для цепи управления выбираем провод марки АПВ.
Определяем поправочные коэффициенты:


Определяем длительно-допустимый ток:


Определяем сечение провода:


К установке принимаем провод марки АПВ(2x2).
1.13. Расчет токов короткого замыкания, проверка аппаратов защиты на чувствительность
Составим расчетную схему и схему замещения:
Принимаем что напряжение на шинах 10 кВ трансформаторной подстанции неизменно, сопротивление от источника питания до этих шин не учитываем. Расчет сопротивлений ведем в именованных единицах (мОм),
Uб = 400 В.
Определяем сопротивление трансформатора:
- активное:


где





- реактивное:


где



Сопротивление автоматического выключателя составит:


Сопротивление кабеля ВВГ (4 x 6) длинною 2м составит:


где






Определяем результирующее сопротивление:




Определяем установившийся ток короткого замыкания:




Определяем ударный ток при






Ток короткого замыкания от электродвигателя при


Определяем ударный ток электродвигателя:




Определяем полное значение ударного тока от системы и электродвигателя:


Проверяем аппараты защиты на чувствительность:
1.14.
Описание работы схемы управления электроприводом
Привод осуществляется от асинхронного двигателя с короткозамкнутым ротором. Параллельно обмотке статора включен электромагнитный тормоз, колодки которого разжимаются при подаче напряжения на двигатель. Командным аппаратом в схемах управления такими лифтом является рычажный переключатель.
Для пуска двигателя на подъем или спуск кабины переключатель следует поставить соответственно в положение 1 (или 2). Через контакты дверей шахты, контакты конечных выключателей и (размыкающихся при срабатывании механизма ловителей при обрыве несущих канатов), контакт дверей кабины и гибкий кабель от сети подается напряжение на катушку магнитного пускателя. После включения контактора на статор двигателя и катушки электромагнитного тормоза будет подано питание, и кабина лифта начнет двигаться вверх (или вниз).
Для остановки кабины рукоятку переключателя следует поставить в среднее положение, что вызывает отключение магнитного пускателя и остановку двигателя. Если кабина по каким-либо причинам не остановилась против уровня этажной площадки, то ее доводку можно произвести путем повторного включения двигателя; специальных мер для точной остановки в таких лифтах не принимают.
Вызов кабины на этажи производится с помощью кнопок. При воздействии на любую из них в кабине срабатывает соответствующее указательное реле, включается звонок и загорается соответствующая сигнальная лампочка. Проводник включает привод на требуемое перемещение кабины. В случае неисправности лифта из кабины в диспетчерскую может быть подан сигнал путем включения звонка кнопкой находящейся в кабине лифта. Введение
В различных отраслях народного хозяйства используются подъемные механизмы прерывистого режима работы, служащие для перемещения людей и грузов в вертикальном направлении по строго определенному пути в специальных грузонесущих устройствах - кабинах, ковшах, сосудах и т.п. К числу самых распространенных механизмов вертикального транспорта относятся лифты, которые находят все большее применение в зданиях современных промышленных предприятий и в жилых домах.
Лифты являются стационарными механизмами, предназначенными для транспортировки с одного этажа здания на другой грузов и людей в кабинах, которые перемещаются в огражденной со всех сторон шахте. В настоящее время лифты выполняются с высокой степенью автоматизации операций по открыванию и закрыванию дверей, по передвижению и остановке кабины; они отличаются безусловной безопасностью, комфортабельностью и общедоступностью пользования.
По назначению лифты разделяют на пассажирские, грузовые с проводником и без проводника, грузопассажирские, специальные. По скорости движения кабины различают тихоходные (до 0,5 м/с), быстроходные (до 1,0 м/с) и скоростные (свыше 1,0 м/с) пассажирские лифты. Грузовые лифты чаще всего работают при скорости движения кабины 0,1—0,5 м/с. Грузоподъемность пассажирских лифтов составляет от 250 до 1500 кг (т. е. от 3 до 21 пассажира), грузовых — от 50 до 5000 кг.
При большом разнообразии вариантов конструкций пассажирских и грузовых лифтов основными узлами оборудования для них являются подъемная лебедка, канаты, кабина, противовес, двигатель, механический тормоз и аппаратура управления.
2.ЭЛЕКТРООБОРУДОВАНИЕ И ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОДЪЕМА МОСТОВОГО КРАНА
Крановое электрооборудование является одним из основных средств комплексной механизации всех отраслей народного хозяйства. Подавляющее большинство грузоподъемных машин изготовляемых отечественной промышленностью, имеет привод основных рабочих механизмов, и поэтому действия этих машин в значительной степени зависит от качественных показателей используемого кранового оборудования.
Перемещение грузов, связанное с грузоподъемными операциями, во всех отраслях народного хозяйства, на транспорте и в строительстве осуществляется разнообразными грузоподъемными машинами.
Грузоподъемные машины служат для погрузочно - разгрузочных работ, перемещения грузов в технологической цепи производства или строительства и выполнения ремонтно - монтажных работ с крупногабаритными агрегатами.
Грузоподъемные машины с электрическими приводами имеют чрезвычайно широкий диапазон использования, что характеризуется интервалом мощностей приводов от сотен ватт до 1000кВт. В перспективе мощности крановых механизмов может дойти до 1500 –2500 кВт.
Мостовые краны в зависимости от назначения и характера выполняемой работы снабжают различными грузозахватными приспособлениями: крюками, грейферами, специальными захватами и т.п. Мостовой кран весьма удобен для использования, так как благодаря перемещению по крановым путям, располагаемым в верхней части цеха, он не занимает полезной площади.
Электропривод большинства грузоподъёмных машин характеризуется повторно - кратковременном режимом работы при большей частоте включения, широком диапазоне регулирования скорости и постоянно возникающих значительных перегрузках при разгоне и торможении механизмов. Особые условия использования электропривода в грузоподъёмных машинах явились основой для создания специальных серий электрических двигателей и аппаратов кранового исполнения. В настоящее время крановое электрооборудование имеет в своём составе серии крановых электродвигателей переменного и постоянного тока, серии силовых и магнитных контроллеров, командоконтроллеров, кнопочных постов, конечных выключателей, тормозных электромагнитов и электрогидравлических толкателей, пускотормозных резисторов и ряд других аппаратов, комплектующих разные крановые электроприводы.
В крановом электроприводе начали довольно широко применять различные системы тиристорного регулирования и дистанционного управления по радио каналу или одному проводу.
В настоящее время грузоподъемные машины выпускаются большим числом заводов. Эти машины используются во многих отраслях народного хозяйства в металлургии, строительстве, при добыче полезных ископаемых, машиностроении, транспорте, и в других отраслях.
Развитие машиностроения, занимающиеся производством грузоподъемных машин, является важным направлением развития народного хозяйства страны.
2.1 Краткая характеристика механизма подъема мостового крана
Электрические подъёмные краны - это устройства служащие для вертикального и горизонтального перемещения грузов. Подвижная металлическая конструкция с расположенной на ней подъемной лебёдкой являются основными элементами подъёмного крана. Механизм подъемной лебёдки приводится в действие электрическим двигателем.
Подъемный кран представляет собой грузоподъемную машину циклического действия, предназначенную для подъема и перемещения груза, удерживаемого грузозахватным устройством (крюк, грейфер). Он является наиболее распространенной грузоподъемной машиной, имеющей весьма разнообразное конструктивное исполнение и назначение.
Мостовой кран (рис.1) представляет собой мост, перемещающейся по крановым путям на ходовых колесах, которые установлены на концевых балках. Пути укладываются на подкрановые балки, опирающиеся на выступы верхней части колонны цеха. Механизм передвижения крана установлен на мосту крана. Управление всеми механизмами происходит из кабины прикрепленной к мосту крана. Питание электродвигателей осуществляется по цеховым троллеям. Для подвода электроэнергии применяют токосъемы скользящего типа, прикрепленные к металлоконструкции крана. В современных конструкциях мостовых кранов токопровод осуществляется с помощью гибкого кабеля. Привод ходовых колес осуществляется от электродвигателя через редуктор и трансмиссионный вал.
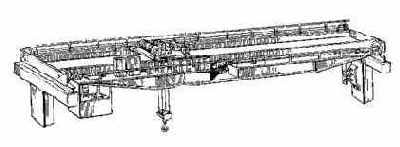
Рисунок 1 – Общий вид мостового крана.
Любой современный грузоподъемный кран в соответствии с требованиями безопасности, может иметь для каждого рабочего движения в трех плоскостях, следующие самостоятельные механизмы: механизм подъема - опускания груза, механизм передвижения крана в горизонтальной плоскости и механизмы обслуживания зоны работы крана (передвижения тележки).
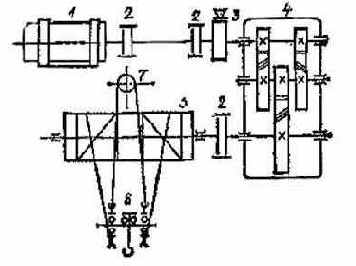
Рисунок 2 - Кинематическая схема механизма подъема главного крюка: 1 - двигатель; 2 - муфта; 3 - тормоз; 4 - редук -тор; 5 - барабан; 6 - полиспаст; 7 - неподвижный блок полис - пасты.
Типичная кинематическая схема механизма подъема крана приведена на рисунке 2
Грузоподъемные машины изготовляют для различных условий использования по степени загрузки, времени работы, интенсивности ведения операций, степени ответственности грузоподъемных операций и климатических факторов эксплуатации. Эти условия обеспечиваются основными параметрами грузоподъемных машин. К основным параметрам механизма подъёма относятся: грузоподъемность, скорость подъема крюка, режим работы, высота подъема грузозахватного устройства.
Номинальная грузоподъемность - масса номинального груза на крюке или захватном устройстве, поднимаемого грузоподъемной машиной.
Скорость подъема крюка выбирают в зависимости от требований технологического процесса, в котором участвует данная грузоподъемная машина, характера работы, типа машины и ее производительности.
Режим работы грузоподъемных машин цикличен. Цикл состоит из перемещения груза по заданной траектории и возврата в исходное положение для нового цикла.
Все многообразие грузоподъемных кранов охвачено восемью режимными группами 1К-8К. Классификация механизмов по группам режимов работы осуществляется по параметрам суммарного времени работы механизмов за срок службы и степени усредненного нагружения крана.
Для данного мостового крана рекомендуемые режимные группы:
- 5К – группа режима работы крана;
- 4М – группа режима работы механизма подъема.
Повышенная опасность работ при транспортировке поднятых грузов требует при проектировании и эксплуатации соблюдение обязательных правил по устройству и эксплуатации подъемно-транспортных машин. На механизмах подъема и передвижения правилами по устройству и эксплуатации предусмотрена установка ограничителей хода, которые воздействуют на электрическую схему управления. Конечные выключатели механизма подъема ограничивают ход грузозахватывающего приспособления вверх, а выключатели механизмов передвижения моста и тележки ограничивают ход механизмов в обе стороны.
Предусматривается также установка конечных выключателей, предотвращающих наезд механизмов в случае работы двух и более кранов на одном мосту. Исключение составляют установки со скоростью движения до 30 м/мин. Крановые механизмы должны быть снабжены тормозами закрытого типа, действующими при снятии напряжения.
На крановых установках допускается применять рабочее напряжение до 500 В, поэтому крановые механизмы снабжают электрооборудованием на напряжения 220, 380, 500 В переменного тока и 220, 440 В постоянного тока. В схеме управления предусматривают максимальную защиту, отключающую двигатель при перегрузке и коротком замыкании. Нулевая защита исключает самозапуск двигателей при подаче напряжения после перерыва в электроснабжении. Для безопасного обслуживания электрооборудования, находящегося на ферме моста, устанавливают, блокировочные контакты на люке и двери кабины. При открывании люка или двери напряжение с электрооборудования снимается.
При работе крана происходит постоянное чередование направления движения крана, тележки и крюка. Так, работой механизма подъема состоит из процессов подъема и опускания груза и процессов передвижения пустого крюка. Для увеличения производительности крана используют совмещение операций: Время пауз, в течение которого двигатель не включен и механизм не работает, используется для навешивания груза на крюк и освобождение крюка, для подготовки к следующему процессу работы механизма. Каждый процесс движения может быть разделен на периоды неустановившегося движения (разгон, замедление) и период движения с установившейся скоростью.
Мостовой кран установлен в литейном цеху металлургического производства, где наблюдается выделение пыли, поэтому электродвигатель и все электрооборудование мостового крана требует защиты общепромышленного исполнения не ниже IP-53 – защита электрооборудования от попадания пыли, а также полная защита обслуживающего персонала от соприкосновения с токоведущими и вращающимися частями, а также защита электрооборудования от капель воды падающих под углом 600 к вертикали.
Краны литейных цехов работают в непрерывно при интенсивном использовании оборудования, наличием высокой температуры окружающей среды и излучением теплоты от раскаленного или расплавленного металла. Кабина управления краном выполняется теплоизолированной. В ней также оборудуется установка для кондиционирования воздуха. Учёт режима работы крана при проектировании и выборе электрооборудования определяет энергетические показатели и надёжность при эксплуатации крановой установки. Правилами Госгортехнадзора предусматривается четыре режима работы механизмов: лёгкий – Л, средний – С, тяжёлый – Т, весьма тяжёлый – ВТ.
Мостовой кран работает в среднем режиме с ПВ40.
2.3. Исходные данные
Исходными данными проектирования являются физические и геометрические параметры механизма подъема мостового крана, а также размеры помещения цеха, в котором рас -положен кран. Исходные данные представлены в таблице 1.
Таблица 1
Исходные данные
|
Наименование параметра |
Значение параметра |
|
1 |
2 |
|
Грузоподъемность главного крюка |
80 т |
|
Скорость подъема главного крюка |
4,6 м/мин |
|
Скорость передвижения крана |
75 м/мин |
|
Скорость передвижения тележки |
30 м/мин |
|
Высота подъема главного крюка |
6 м |
|
Вес главного крюка |
0,8т |
|
Диаметр барабана лебедки главного крюка |
700 мм |
|
Вес тележки |
33 т |
|
Длина перемещения моста |
60 м |
|
Длина перемещения тележки |
22 м |
|
КПД главного подъема под нагрузкой |
0,84 |
|
КПД главного подъема при холостом ходе |
0,42 |
|
КПД моста |
0,82 |
|
КПД тележки |
0,79 |
|
Длина помещения цеха |
62 м |
|
Ширина помещения цеха |
15,5 м |
|
Высота помещения цеха |
10 м |
|
Режим работы крана средний |
С |
|
Продолжительность включения крана % |
40% |
2.4 Расчет статических нагрузок двигателя механизма подъема мостового крана
Целью расчета является определение статических нагрузок, приведенных к валу электродвигателя, для выбора мощности электродвигателя механизма подъема мостового крана.
2.4. 1 Статическая мощность на валу электродвигателя подъемной лебедки при подъеме груза, в кВт определяется следующим образом:
Рст.гр.под =

где G = m•g = 80•103• 9,8= 784000H – вес поднимаемого груза;
m – номинальная грузоподъемность, кг;
g – ускорение свободного падения, м/с2;
G0 = m0•g = 0,8•103•9,8 = 7840Н – вес пустого захватывающего приспособления;
m0 – масса пустого захватывающего приспособления, кг;
vн = 4,6м/мин = 0,07 м/с – скорость подъема груза;
hнагр = 0,84 – КПД под нагрузкой.
Р ст.гр.под .=

2.4.2 Мощность на валу электродвигателя при подъеме пустого захватывающего приспособления, кВт:
Р ст.п.гр.=

где hхх = 0,42КПД – механизма при холостом ходе.
Рст.п.гр.=

2.4.3 Мощность на валу электродвигателя обусловленная весом груза, кВт:
Ргр.= (G + G0)·vс·10-3
где vс = vн = 0,07 м/с – скорость спуска.
Ргр= (784000 + 7840) 0,07·10-3 = 55,42 кВт.
2.4.4 Мощность на валу электродвигателя, обусловленная силой трения, кВт:
Ртр.=(

Ртр .= (

Так как выполняется условие Ргр > Ртр, следовательно, электродвигатель работает в режиме тормозного спуска.
2.4.5 Мощность на валу электродвигателя при тормозном спуске, определяется следующим способом, кВт:
Рт.сп .= ( G + G0)·Vс·(2 -

Рст.сп. = (784000 + 7840) ·0,07· (2 -

2.4.6 Мощность на валу электродвигателя во время спуска порожнего захватывающего приспособления, кВт:
Рс.ст.о.= G0•Vс• (

Рс.ст.о.= 7840•0,07(

2.4.7 Рассчитаем нагрузочный график механизма подъема мостового крана для наиболее характерного цикла работы (Таблица 2)
- Время подъема груза на высоту Н:

где Н – высота подъема груза, м.
- Время перемещения груза на расстояние L:

- Время для спуска груза:

- Время на зацепление груза и его отцепления:
- Время подъема порожнего крюка:

- Время необходимое для возврата крана к месту подъема нового груза:

- Время спуска порожнего крюка:


Вычертим нагрузочный график механизма подъема для рабочего цикла:
Рисунок 3 – Нагрузочный график механизма подъема для рабочего цикла.
Таблица 2
Рабочий цикл механизма подъема
| Участки |
Подъем груза |
Па - уза | Спуск груза |
Па - уза |
Подъем крюка |
Па - уза |
Спуск крюка |
Па - уза |
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
Рс,
(кВт) |
65,98 |
0 |
44,8 |
0 |
1,3 |
0 |
0,2 |
0 |
|
t, (cек) |
85,7 |
48 |
85,7 |
200 |
85,7 |
48 |
85,7 |
200 |
- Суммарное время работы электродвигателя:
- Суммарное время пауз:
2.4.8 Действительная продолжительность включения, %:
ПВд=

ПВд=

2.4.9 Эквивалентная мощность за суммарное время работы электродвигателя, кВт:
Рэкв=

Рэкв=

2.4.10 Эквивалентную мощность пересчитываем на стандартную продолжительность включения соответствующего режима работы механизма крана, кВт:
Рэн=Рэкв •

Рэн=39,8•

2.4.11 Определяем расчетную мощность электродвигателя с учетом коэффициента запаса, кВт:
Рдв=

где Кз = 1,2 – коэффициент запаса;
hред = 0,95 – КПД редуктора.
Рдв=

2.4.12 Угловая скорость лебедки в рад/с и частота вращения лебедки в об/мин, определяется следующим способом:
?л=

где D – диаметр барабана лебедки, м.
?л =

nл =

nл =

Полученные значение мощности электродвигателя в пункте (2.4.11) и значение стандартной продолжительности включения ПВст = 40% , будут являться основными критериями для выбора электродвигателя.
2.5 Выбор типов электродвигателя и редуктора механизма подъема мостового крана
Целью расчета является выбор приводного электродвигателя по справочнику и проверка его по перегрузочной способности и по условиям осуществимости пуска, а также выбор редуктора для механизма подъема мостового крана.
2.5.1 Выберем электродвигатель из следующих условий:
Рном ³ Рдв
Рном ³ 50,7 кВт
Таблица 3
Технические данные асинхронного электродвигателя с фазным ротором типа МТН512-6
|
Параметры двигателя |
Значение параметра |
|
1 |
2 |
|
Мощность, Рн |
55 кВт |
|
Частота вращения, nн |
970 об/мин |
|
Ток статора, I1 |
99 А |
|
Коэффициент мощности, Соs j |
0,76 |
|
КПД, hн |
89 % |
|
Ток ротора, I2 |
86 А |
|
Напряжение ротора, U2 |
340 В |
|
Максимальный момент, Мm |
1630 Нм |
|
Маховый момент, GD2 |
4,10 кг•м2 |
|
Напряжение, U |
380 В |
|
Частота, f |
50 Гц |
|
Продолжительность включения, ПВст |
40 % |
2.5.2 Проверяем выбранный электродвигатель по допустимой нагрузке и условию осуществимости пуска.
Выбранный электродвигатель должен удовлетворять следующим условиям:
- Первое условие допустимой нагрузки:
где Мс.max = 9550 •

Рс – статическая мощность при подъеме груза, кВт;
nн – частота вращения вала электродвигателя, об/мин.
Мс.max = 9550 •

Мдоп = Мm = 1630 Н·м;
Мдоп=1630 Н·м > 649,5 Н·м = Мс.max
Первое условие выполняется.
- Второе условие допустимой нагрузки:
где Мср .п =

М1 = 0,85 • Мm = 0,85 • 1630 = 1385,5 Н·м – максимальный момент двигателя при пуске, Н·м;
М2 = (1,1 - 1,2) • Мн = 1,2 • 649,5 = 779,4 Н·м – минимальный момент двигателя, Н·м;
Мн = 9550 •


Мср.п =

1,5 • Мс.max = 1,5 • 649,5 = 974,25 Н·м;
Мср.п = 1082,45 Н·м > 974,25 Н·м = 1,5 • Мс.max
Второе условие выполняется.
- Третье условие допустимой нагрузки:
1,2 •Мс.max = 1,2 • 649,5 = 779,4 Н·м.
М2 = 779,4 Н·м ? 779,4 Н·м = 1,2 • Мс.max
Третье условие выполняется.
- Проверяем двигатель по условию осуществимости пуска:
где ад – допустимое линейное ускорение при подъеме или перемещении груза, м/с2;
ад = (0,2 ÷ 0,3) м/с2 – для механизма подъема;
a – наибольшее линейное ускорение при подъеме груза, м/с2.
а =

где tп.мин – наименьшее время при пуске с состояния покоя до скорости v с наибольшей загрузкой, сек.
tп.мин =

где GD2прив = 4 • Jприв, кг•м2
где Jприв = 1,3 • Jдв +

где Jдв =

?к.мех =

Мс.мах = 9550 •

Мс.мах. = 9550 •

?к.мех =

Jдв=

Jприв = 1,3 • 1,025 +

GD2прив = 4 • 1,37 = 5,48 кг•м2;
tп.мин =

а =

ад = 0,3 м/с2 > 0,218 м/с2 = а
Условие осуществимости пуска выполняется.
Так как электродвигатель МТН 512 - 6 удовлетворяет всем условиям выбора, то для привода механизма подъема мостового крана устанавливаем электродвигатель данного типа.
2.5.3 Выбираем тип редуктора.
Редуктор применяют из - за разногласия скорости вращения барабана лебедки механизма подъема и вала электродвигателя. Редуктор выбирают по мощности, передаточному числу и скорости вращения.
Определяем передаточное число редуктора:
iР =

где D – диаметр барабана лебедки, м;
iп – передаточное число полиспастной системы.
iР=

Выбираем тип редуктора Ц2 - 500 со следующими техническими данными:
nр = 970 об/мин;
Рр = 49 кВт;
iР = 50.94
m = 505 кг.
2.6 Расчет и выбор ступеней сопротивлений в цепях электропривода механизма подъема мостового крана
Целью данного расчета является выбор магнитного контроллера переменного тока, в соответствии с его выбором определяются сопротивления и токи ступеней для электропривода механизма передвижения тележки мостового крана.
2.6.1 Базисный момент, Н·м:
М100% = 9550 •

М100% = 9550 •
2.6.2 Определяем расчетный ток резистора, А:
I100% =

где Iн – номинальный ток ротора, А;
Рн – номинальная мощность электродвигателя, кВт;
nн – номинальная частота вращения, об/мин.
I100%=

2.6.3 Определяем номинальное сопротивление резистора, в Ом:
Rн =

где Ерн – напряжение между кольцами ротора, В.
Rн =

2.6.4 Для магнитного контроллера ТСАЗ160 с защитой на переменном токе находим разбивку ступеней сопротивлений и определяем сопротивление каждого резистора (в одной фазе):
R = Rном. •

Обозначение ступени Rступ,% R ,Ом
Р1 - Р4 5 0,095 Р4 - Р7 10 0,19
Р71 - Р10 20 0,38
Р10 - Р13 27 0,513
Р13 - Р16 76 1,444
Р16 - Р19 72 1,368
Общее 210 3,99
2.6. 5 Находим расчетную мощность резистора (в трех фазах), кВт:
Рр =

2.6.6 Параметры для условий режима С:
Частота включений фактическая 120 в час, приведенная
z = 120 •


k = 1,25 – коэффициент нагрузки;
а = 1,2 – коэффициент использования;
hэкв.б = 0,76 – базисный КПД электропривода;
hэкв = 0,73 – КПД электропривода для z = 136,2;
hдв = 0,85 – КПД электродвигателя;
e0 = 0,4 – относительная продолжительность включения.
Рр =

=16,2 кВт.
На одну фазу приходится:

2.6.7 Определяем расчетный ток резистора, А.
Iр =


2.6.8 Значения расчетных токов по ступеням:
I = Iр •

Обозначение ступени Iступ, % I , А
Р1 - Р4 83 50,3 Р4 - Р7 59 35,75
Р71 - Р10 59 35,75
Р10 - Р13 50 30,3
Р13 - Р16 42 25,45
Р16 - Р19 30 18,18
2.6.9 В соответствии с таблицей нормализованных ящиков резисторов НФ 1А выбираем для ступеней Р1 - Р4, Р4 - Р7, Р7 - Р10 ящик 2ТД.754.054-06, имеющий длительный ток 102 А и сопротивление 0,48 Ом. Для ступеней Р10 - Р13, Р13 - Р16 выбираем ящик 2ТД.754.054-08, имеющий длительный ток 64 А и сопротивление 1,28 Ом. Для ступеней Р16 - Р19, выбираем ящик 2ТД.754.054-11, имеющий длительный ток 41 А и сопротивление 3,1 Ом.
2.6.10 Рассчитаем отклонение сопротивлений от расчета и данные занесем в таблицу - 4:
R% =

Таблица 4
Отклонения сопротивлений от расчета.
|
Ступени |
Rрасч
,Ом |
Rфакт
,Ом |
R% ,.% |
|
1 |
2 |
3 |
4 |
| Р1-Р4 |
0,095 |
0,096 |
-1 |
|
Р4-Р10 |
0,19 |
0,196 |
-3,157 |
|
Р71-Р10 |
0,38 |
0,352 |
7,3 |
|
Р10-Р13 |
0,513 |
0,512 |
0,2 |
|
Р13-Р16 |
1,444 |
1,444 |
0 |
|
Р16-Р19 |
1,368 |
1,387 |
-1,38 |
|
Итого |
4,3 |
Учитывая что, длительные токи выбранных ящиков сопротивлений соответствуют расчетным значениям токов ступеней и отклонение сопротивлений отдельных ступеней от расчетных значений не превышает ± 15%, а отклонение общего сопротивления резистора не превышает ± 5% его расчетного значения, резистор выбран правильно.
Проверки по кратковременному режиму не производим, так как расчетный ток Iр=60,61 А близок к длительному току пусковых ступеней.
2.7 Расчет естественных и искусственных механических характеристик электродвигателя и механизма подъема мостового крана
Целью расчета является расчет и построение естественной и искусственных механических характеристик электродвигателя и механизма подъёма мостового крана.
Исходными данными являются технические данные выбранного электродвигателя МТН 512-6 пункта 5, и механизма подъёма пункта 3, а также данные обмоток ротора и статора:
r1=0,065 Ом – активное сопротивление обмотки статора;
х1=0,161 Ом – реактивное сопротивление обмотки статора;
r2=0,05 Ом – активное сопротивление обмотки ротора;
х2=0,197 Ом – реактивное сопротивление обмотки ротора;
к =1,21 – коэффициент приведения сопротивления.
2.7.1 Определим номинальное скольжение:
S н=

где ?0 =


? н =


sн =

2.7.2 Номинальный момент:
Мн=


2.7.3 Определим коэффициент перегрузочной способности:
? =


2.7.4 Определим критическое скольжение:
sкр= sн( ?+v(? 2-1))
sкр=0,03(3+v(32-1))=0,17
2.7.5 Определим номинальное активное сопротивление ротора:
r2н=


где U2 – напряжение ротора, В;
I2 – ток ротора, А.
2.7.6 Активное сопротивление обмотки ротора:
R2вт=R2н•Sн=2,28•0,03=0,068 Ом
2.7.7 Найдём суммарное активное сопротивление роторной цепи для каждой ступени:
R2å =R2вт + R2ВШ
где R2вш – сопротивление реостата в цепи ротора.
R2ВШ1 =0,096 R2å1 = 0,164
R2ВШ2 =0,292 R2å2 =0,36
R2ВШ3 = 0,644 R2å2 =0,712
R2ВШ4 =1,156 R2å4 =1,224
R2ВШ5 =2,6 R2å5 =2,668
R2ВШ6 =3,9 R2å6 =3,968
2.7. 8 Для построения механических характеристик зададимся значениями скольжения от 0 до 1 и подставим в выражение:
М = 2 • Ммах. •

где а =


2.7.9 Скольжение на искусственных характеристиках при выбранных значениях sе вычисляются по формуле:
sи = sе •

2.7.10 Угловые скорости на искусственных характеристиках вычисляются по формуле:
?и = ?0 • (1- s)
2.7.11 Результаты расчётов М, ?е, sи, ?и при различных значениях s приведены в таблице 5.
2.7.12 Рассчитаем механическую характеристику механизма подъёма мостового крана.
Механические характеристики производственных механизмов рассчитываются по формуле Бланка, Н·м:
Мст. = М0 + (Мст.н - М0) •

где Мст0 – момент сопротивления трения в движущихся частях, Н·м;
Мст.н – момент сопротивления при номинальной скорости, Н·м;


х – показатель степени, который характеризует статический момент при изменении скорости вращения. Для механизмов перемещения и подъёма кранов х = 0. Следовательно:
Мст. = Мст.н. =


где Рст = 65,98 кВт - статическая эквивалентная мощ - ность, пересчитанная на стандартную продолжительность включения, кВт;
Мст. = Мст.н. =

2.7.13 Построение графика механической характеристики механизма подъёма мостового крана производим на том же графике, где и механическая характеристика выбранного электродвигателя.
2.7. 14 По графику видно, что механическая характеристика механизма подъёма имеет форму прямой линии, из этого следует, что статический момент Мст не зависит от скорости вращения.
Таблица 5
Сводная таблица по результатам расчётов естественной и искусственных механических характеристик электродвигателя.
|
Se |
We |
Мдв |
Sи1 |
Wи1 |
Sи2 |
Wи2 |
Sи3 |
Wи3 |
Sи4 |
Wи4 |
Sи5 |
Wи5 |
Sи6 |
Wи6 |
|
0 |
104,6 |
0 |
0 |
104,6 |
0 |
104,6 |
0 |
104,6 |
0 |
104,6 |
0 |
104,6 |
0 |
104,6 |
|
0,01 |
103,5 |
215,9 |
0,024 |
102,0 |
0,052 |
99,06 |
0,104 |
93,6 |
0,18 |
85,7 |
0,392 |
63,5 |
0,58 |
43,56 |
|
0,02 |
102,5 |
420,3 |
0,048 |
99,55 |
0,105 |
93,52 |
0,209 |
82,7 |
0,36 |
66,9 |
0,784 |
22,5 |
1,16 |
-17,47 |
|
0,03 |
101,4 |
610,14 |
0,072 |
97,0 |
0,158 |
87,98 |
0,31 |
71,7 |
0,54 |
48,1 |
1,177 |
-18,52 |
1,75 |
-78,51 |
|
0,1 |
94,14 |
1448,4 |
0,24 |
79,37 |
0,52 |
49,22 |
1,047 |
-4,92 |
1,8 |
-83,68 |
3,923 |
-305,8 |
5,83 |
-505,7 |
|
0,17 |
86,8 |
1630 |
0,41 |
61,71 |
0,9 |
10,46 |
1,78 |
-81,5 |
3,06 |
-215,4 |
6,67 |
-593,082 |
9,92 |
-933,032 |
|
0,2 |
83,68 |
1611,4 |
0,48 |
54,14 |
1,05 |
-6,15 |
2,09 |
-114,4 |
3,6 |
-271,96 |
7,84 |
-716,202 |
11,67 |
-1116,14 |
|
0,3 |
73,22 |
1424,6 |
0,72 |
28,91 |
1,58 |
-61,52 |
3,14 |
-223,9 |
5,4 |
-460,24 |
11,7 |
-1126,6 |
17,5 |
-1726,52 |
|
0,4 |
62,76 |
1217,9 |
0,96 |
3,69 |
2,11 |
-116,9 |
4,18 |
-333,48 |
7,2 |
-648,52 |
15,7 |
-1537 |
23,3 |
-2336,89 |
|
0,5 |
52,3 |
1046,7 |
1,2 |
-21,53 |
2,64 |
-172,2 |
5,23 |
-443,01 |
9 |
-836,8 |
19,6 |
-1947,41 |
29,17 |
-2947,26 |
|
0,6 |
41,84 |
911,41 |
1,44 |
-46,76 |
3,17 |
-227,6 |
6,28 |
-552,5 |
10,8 |
-1025,08 |
23,5 |
-2357,81 |
35,011 |
-3557,63 |
|
0,7 |
31,38 |
804,27 |
1,68 |
-71,9 |
3,7 |
-283,03 |
7,32 |
-662,05 |
12,6 |
-1213,3 |
27,46 |
-2768,21 |
40,84 |
-4168 |
|
0,8 |
20,92 |
718,28 |
1,92 |
-97,21 |
4,23 |
-338,4 |
8,37 |
-771,5 |
14,4 |
-1401,6 |
31,38 |
-3178,61 |
46,68 |
-4778,37 |
|
0,9 |
10,46 |
648,14 |
2,17 |
-122,4 |
4,76 |
-393,7 |
9,42 |
-881,1 |
16,2 |
-1589,9 |
35,31 |
-3589,01 |
52,51 |
-5388,75 |
|
1 |
0 |
590 |
2,4 |
-147,6 |
5,3 |
-449,16 |
10,47 |
-990,6 |
18 |
-1778,2 |
39,23 |
-3999,41 |
58,35 |
-5999,12 |
Рисунок 4 – Естественные и искусственные механические характеристики электродвигателя и механизма подъема мостового крана.
2.8 Расчет переходного процесса электропривода механизма подъема мостового крана
Целью расчета является построение характеристик зависимости момента и угловой скорости вращения электродвигателя от времени при пуске, а также определение времени переходного процесса.
По реостатным характеристикам (рисунок 4), видно, что электродвигатель можно запустить только по характеристикам 4, 5, 6, поэтому переходной процесс рассчитаем при введенных в цепь ротора сопротивлений rд4, rд5 и rд6.
На рисунке 4 находим установившиеся и начальные значения скоростей на каждой пусковой характеристике.
Характеристика Установившиеся Начальные
скорости рад/с скорости рад/с
4


5


6


Определяем электромеханическую постоянную времени для каждой ступени, сек.:
Тм = Jприв •

где Jприв = 1,37 кг/м2 – момент инерции электропривода;
?0 = 104,6 рад/с – угловая скорость идеального холостого хода;
? – начальная скорость;
М1 = 1385,5 Нм момент пуска.
Тм = Jприв •


Тм = Jприв •


Тм = Jприв •


Для каждого интервала скорости рассчитаем соответствующий интервал времени, сек.:
t = Тм • ln •

где М2 = 779,4 Н ·м – момент переключения;
Мст = 649,5 Н· м – момент статической нагрузки.
t1 = 0,126 • ln •

t2 = 0,061 • ln •
t3 = 0,028 • ln •
Определим время переходного процесса:
t = t1 + t2 + t3 = 0,217 + 0,105 + 0,048 = 0,37 сек.
Зависимость ?=¦(t) для каждой ступени можно рассчитать по уравнению изменения угловой скорости во времени:
где ?уст. – установившаяся угловая скорость, рад/с.
Зависимость М=¦(t) для каждой ступени можно рассчитать по уравнению изменения момента во времени:
М = Муст. • (1 - е-t/Tм) + М1 • е-t/Tм
Результаты расчета занесем в таблицы.
Таблица 6
Расчетные данные необходимые для построения графиков зависимостей ?=¦(t) и М=¦(t).
|
Вели - |
Характеристики при введённых |
||||
|
чины |
добавочных сопротивлениях |
||||
|
rд4 |
|||||
|
t, сек. |
0 |
0,07 |
0,14 |
0,217 |
|
|
w, рад/с |
0 |
29 |
45 |
56 |
|
|
М, Нм |
1385,5 |
1073 |
893 |
782 |
Расчетные данные необходимые для построения графиков зависимостей ?=¦(t) и М=¦(t).
|
Вели - |
Характеристики при введённых |
||||
|
чины |
добавочных сопротивлениях |
||||
|
rд5 |
|||||
|
t, сек. |
0 |
0,035 |
0,07 |
0,105 |
|
|
tнач, сек. |
0,217 |
0,252 |
0,287 |
0,322 |
|
|
w, рад/с |
55 |
69 |
77 |
82 |
|
|
М, Нм |
1385,5 |
1065 |
885 |
782 |
Расчетные данные необходимые для построения графиков зависимостей ?=¦(t) и М=¦(t).
|
Вели - |
Характеристики при введённых |
||||
|
чины |
добавочных сопротивлениях |
||||
|
rд6 |
|||||
|
t, сек. |
0 |
0,016 |
0,032 |
0,048 |
|
|
tнач, сек. |
0,322 |
0,338 |
0,354 |
0,37 |
|
|
w, рад/с |
82 |
88 |
92 |
94 |
|
|
М, Нм |
1385,5 |
1067 |
886 |
782 |
2.9. Выбор аппаратуры управления и защиты электропривода механизма подъема мостового крана
Целью расчета является выбор магнитного контроллера, контакторов, магнитных пускателей, реле защиты от токов перегрузки, конечных выключателей электропривода, и защитной панели.
2.9.1 Выбор магнитного контроллера.
Магнитные контроллеры представляют собой сложные комплектные коммутационные устройства для управления крановыми электроприводами. В магнитных контроллерах коммутация главных цепей осуществляется с помощью контакторов с электромагнитным приводом.
Выбор магнитных контроллеров для крановых механизмов определяется режимом работы механизма и зависит от параметров износостойкости контакторов. Магнитные контроллеры должны быть рассчитаны на коммутацию наибольших допустимых значений тока включения, а номинальный ток их Iн должен быть равен или больше расчетного тока двигателя при заданных условиях эксплуатации и заданных режимах работы механизма:
Iн³ Iр·к
где к = 0,8 – коэффициент, учитывающий режим работы механизма.
Выберем магнитный контроллер серии ТСАЗ160, так как он удовлетворяет условию выбора:
Iн = 160 А > 68,8 А = 86·0,8 = Iр ·к
Таблица 9
Технические данные магнитного контроллера ТСАЗ160.
|
Тип контроллера |
Режим работы механизма |
Назначение |
Номинальный ток, А |
Наибольший допустимый ток включения, А |
Количество управляемых двигателей |
|
1 |
2 |
3 |
4 |
5 |
6 |
|
ТСАЗ160 |
С для кранов металлурги - ческого производства |
Механизм подъема со встроенной защитой |
160 |
700 |
1 |
Контакторы используются в системах управления крановыми электроприводами для осуществления коммутации тока в главных цепях при дистанционном управлении.
Контакторы серий КТ и КТП предназначены для коммутации главных цепей электроприводов переменного тока с номинальным напряжением 380 В.
Контакторы серии КТП выполняются с втягивающими катушками постоянного тока на номинальное напряжение: 24, 48, 110 и 220 В. Серии контакторов КТП применяемые в крановых ЭП, охватывают четыре величины на номинальные токи: 100, 160, 250 и 400 А.
Выбор контактора произведем по пусковому току двигателя Iп, который должен быть меньше или равен номинальному току включения выбираемого контактора Iн.в.
Iп £ Iн.в
Выберем контактор серии КТП6024, так как он удовлетворяет условию выбора:
Iп = 86 А < 120 А = Iн.в
Таблица 10
Технические данные контактора серии КТП6014.
|
Тип контактора |
Номинальный ток, А |
Число включений в час |
Износостойкость, 106 циклов В-О |
Число главных контактов |
Мощность катушки, Вт |
||
|
Механическая |
Электрическая |
||||||
|
Для категорий ДС-3 |
Для категорий ДС-4 |
||||||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
|
КТП6024 |
120 |
600 |
5 |
0,5 |
0,03 |
4 |
50 |
Защитная панель крана является комплектным устройством, в котором расположен общий рубильник питания крана, линейный контактор для обеспечения нулевой защиты и размыкания цепи при срабатывании нулевой защиты, предохранители цепи управления, комплект максимальных реле, а также кнопка и пакетный выключатель, используемый в цепях управления.
Основным назначением защитной панели является обеспечение максимальной и нулевой защиты электроприводов управляемых при помощи кулачковых контроллеров или магнитных контроллеров.
Конструктивно защитная панель представляет собой металлический шкаф с установленными в нем на задней стенке аппаратами и существующим монтажом. В защитной панели установлены только основные и вспомогательные контакты максимальных реле с приводными скобами.
Укомплектуем данный кран защитной панелью типа ПЗКБ 160.
Таблица 11
Технические данные защитной панели типа ПЗКБ 160.
| Тип |
Каталожный номер |
Напряжение, В |
Номинальный ток продолжительного режима, А |
Суммарный номинальный ток двигателей, А |
Число максимальных реле РЭО 401 |
Назначение |
Максимальный коммутационный ток, А |
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
| ПЗКБ 160 |
3ТД.660.046.3 |
380 |
160 |
260 |
8 |
Магнитные и кулачковые контроллеры |
1600 |
2.9. 4 Выбор реле защиты от перегрузок.
Обеспечение максимальной и нулевой защиты крановых электроприводов управляемых при помощи магнитных контроллеров возлагается на защитные панели.
Для защиты цепей кранового электрооборудования от перегрузок применяется электромагнитное реле мгновенного действия типа РЭО401, которые могут использоваться как в цепях переменного тока, так и постоянного тока. Эти реле входят в комплект защитных панелей. Чтобы защитить двигатель от перегрузки, достаточно иметь электромагнитное реле РЭО401 в одной фазе каждого двигателя. В остальные фазы реле ставится только для защиты проводов.
Реле для отдельных электродвигателей выбирается согласно их мощности и напряжению, и настраиваются на ток срабатывания, равный 2,5-кратному расчетному току номинальной нагрузки для ПВ=40%:
2,5·I1 £ Iреле
Выберем реле серии РЭО401, так как оно удовлетворяет условию выбора:
2,5·I1 = 2,5·99 = 247,5 А < 375 А = Iреле
Таблица 12
Технические данные реле РЭО 401.
| Каталожный номер |
Ток катушки, А |
Пределы регулирования, А |
Выводы катушки |
||
|
Реле РЭО 401 |
Электромагнит РЭО 401 |
При ПВ=40% |
При ПВ=100% |
||
|
1 |
2 |
3 |
4 |
5 |
6 |
|
2ТД.304.096-4 |
6ТД.237.004-2 |
375 |
250 |
325-1000 |
М12 |
Защита от перехода механизмом предельных положений осуществляется конечными и путевыми выключателями. Эта защита обязательна к применению для всех механизмов крана.
Контакты конечных выключателей включены в цепь катушки линейного контактора защитной панели и в цепь нулевой защиты магнитных контроллеров.
Для механизма подъема выберем конечный выключатель типа КУ703.
Таблица 13
Технические данные кранового конечного выключателя.
|
Тип |
Назначение |
Привод |
Включаемый ток, А |
Скорость передвижения механизма, м/мин |
Число включений в час |
Степень защиты от внешней среды |
Отключаемый переменный ток, А до 500 В |
Электрическая износостойкость циклов В-О |
Механическая износостойкость, циклов В-О |
Число цепей |
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
|
КУ 703 |
Механизм подъема |
Самовозврат под действием груза |
10 |
1-80 |
600 |
IP44 |
10 |
0,3*106 |
1*106 |
2 |